Meet the Aussie robot squad heading underground in DARPA challenge
- 08 August, 2019 11:11

A squad of five Australian robots is heading to the US next week to compete in an underground mapping and rescue challenge set by the Defense Advanced Research Projects Agency (DARPA).
The challenge will see the robots head deep into the subterranean tunnels of a Pittsburgh research mine, which they will have to remotely map, before identifying and reporting on the numerous objects and artefacts hidden within.
The feat is significant given the dusty, dark conditions of the tunnels and the lack of direct communications to operators above. The robots will have to autonomously navigate the tunnel system before finding and identifying survivors, exit points, and items such as backpacks and walkie-talkies.
They’ll work as a team to get the job done, and each robot brings its own strengths and special skills to the squad. Some are speedy and walk on legs, others move on tracks and are tough enough to be employed by police emergency response teams, while others can fly.
The tunnel circuit is the first of three circuits in the DARPA Subterranean ‘SubT’ Challenge, with an ‘urban’ circuit and ‘cave’ circuit coming next year.
In the last few weeks, the CSIRO Data61 led team behind the robots has been giving them new capabilities, with researchers from partner organisations Emesent and GeorgiaTech.

The squad’s communications system currently utilises a chain of Wi-Fi nodes that will be deployed by the biggest of the bots to form a main communications trunk. The other robots will be able to detach from the trunk and go into autonomous ‘explore’ mode where they map and process ‘frontiers’ to be investigated further.
The robots can return and re-connect to the communications trunk using their own localised mapping and path-finding ability. This means wide areas can be analysed without the need for a dedicated communications infrastructure everywhere.
The bot squad has been training hard in recent weeks on a 200m tunnel course that has been constructed from netted tunnels (usually used to protect plants) at Data61’s new Brisbane test facility ‘The Ric’ which launched in March.

Earlier this year, some of the robots were put through their paces down in the Colorado School of Mines Edgar Experimental Mine – once a working gold and silver mine – in the challenge’s qualifying round.
Before they head to Pittsburgh to compete against ten global teams next week, Computerworld met the fantastic five machines and checked out their vital statistics.
Titan
(BIA5 OzBot Titan)

Moves on: Two caterpillar tracks
Top speed: More than 10km/h
Special skill: Can lift its own weight and navigate especially rough terrain. Unlike many robots, it can comfortably climb stairs.
Squad role: The leader of the pack. Titan is responsible for the communications trunk that serves the other robots, deploying the network by placing WiFi nodes down into the tunnel complex.
Battery life: 180 minutes on flat, even ground
Made by: Australian start-up BIA5, designed in partnership with Deakin University
Background: The OzBot Titan is currently being used by Queensland Police Service's Special Emergency Response Team to force entry into barricaded buildings and pull people from harm and provide information of the situation to officers outside.
Bruce
(CSIRO’s Data61 proprietary Hexapod system)

Moves on: Six legs
Top speed: Working up to a steady 3.6km/h
Special skill: Navigating complex and uneven terrain.
Squad role: Bruce is the newcomer to the group and will serve take on a number of roles, including autonomous search, environment mapping and object detection
Battery life: 30 minutes on flat, uneven ground
Made by: CSIRO’s Data61
Background: Bruce is a completely new hexapod and has been designed from the ‘leg up’ specifically for underground operations. It was manufactured using 3D printed components which means replacement parts can be easily made following any accidents.
Ghost
(GHOST Robotics Vision60)
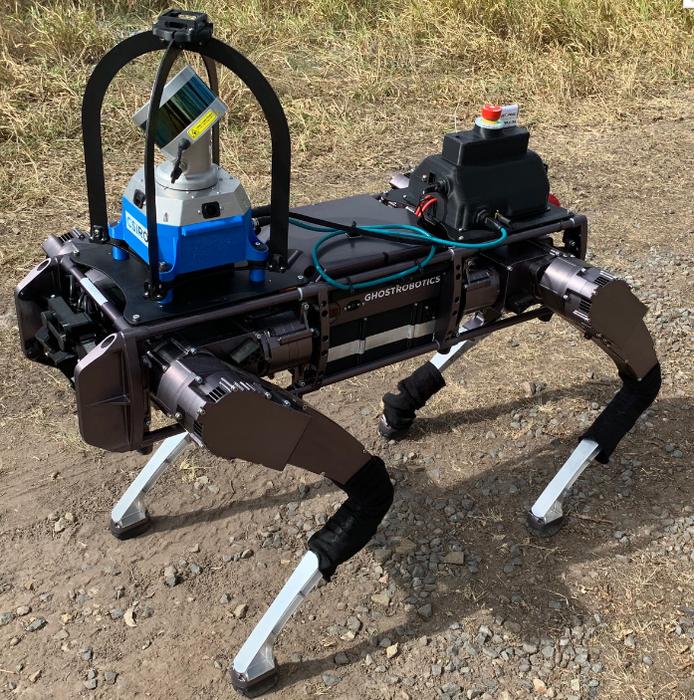
Moves on: four legs
Top speed: Around 3.5km/h
Special skill: Ghost is especially good at walking on outdoor, unstructured terrain and is able to self-right itself from any fall or sticky situation. It can even operate upside down if necessary.
Squad role: Like Bruce, Ghost will take on responsibilities for autonomous search, environment mapping and object detection
Battery life: 8 to 10 hours of mixed-use
Made by: The Philadelphia, PA based GHOST Robotics, a spinout from the University of Pennsylvania
Background: Moving a little like a dog – except backwards, sideways and upside down if required – this quadruped has been designed with reduced mechanical complexity in mind, so there’s less that can go wrong.
GHOST Vision60s are being trialled and used by the United States Naval Special Warfare Command, the United States Army Futures Command, Google, DeepMind and NVIDIA.
Hovermap
(Emesent Hovermap HF1)

Moves on: Six rotors carry it through the air
Top speed: Can accurately map at 5m/s; and do so with reduced point cloud density at speeds of up to 10m/s
Special skill: A self-contained, baked bean can sized unit consisting of a small processor and a spinning cylinder, Hovermap emits 300,000 laser beams a second to create 3D LiDAR-maps.
Squad role: Hovermap is the chief mapper and navigator of the squad and for the SubT challenge will be carried on a drone.
Battery life: On a drone up to 25 minutes; and in hand-held mode up to an hour
Made by: Emesent, a recent spinout from CSIRO’s Data61
Background: Over the last 18 months, Hovermap has undergone rigorous testing in the field by early adopters in the US, Canada, Australia, China and Japan.
Last year, CSIRO sent a drone fitted with its Hovermap payload 600 metres underground, down a mine in Western Australia.
SuperDroid
(SuperDroid Robots Inc LT2)

Moves on: Two caterpillar tracks
Top speed: 0.5 m/s
Special skill: The robot is lightweight but tough and can go over and get under all kinds of obstacles. The treads are driven by powerful motors and its axles are made from solid high strength steel so they will not bend if the robot is dropped.
Squad role: An all rounder that can be configured for autonomous search, environment mapping or object detection. Superdroid is happy to try anything, and can is suited for rapid testing and prototyping.
Battery life: 240 mins on flat, even ground
Made by: A North Carolina-based firm called SuperDroid Robots Inc
Background: The LT2 has used in all kinds of situations and is currently being trialed by US law enforcement agencies. One was fitted with a HD camera payload and used to film lions in Africa's Serengeti for National Geographic.
All images courtesy of CSIRO Data61