

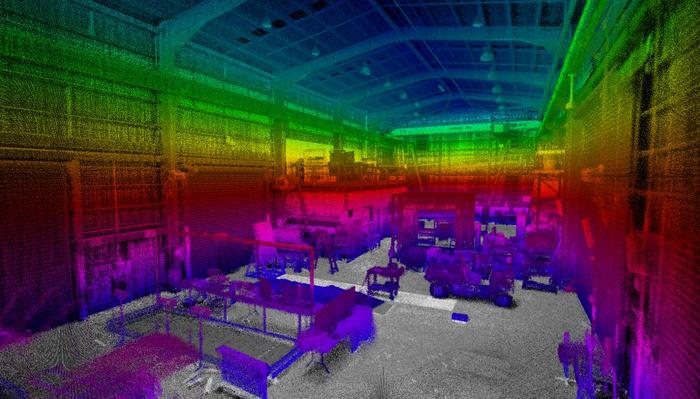
Data61 has been working on a method of compressing the LIDAR made maps. Researchers recently devised a way to compress an image of a five hectare environment down to five or six megabytes.
“Whereas the total map would be multiple gigabytes,” says Pauling. “The trade-off is resolution and fidelity so these kind of things feed into what is required in the scenario and what do we do to get the information back that’s required on the surface.”
The work is done on board the drone or robot which will be fitted with “desktop power computers” with CPUs and GPUs.
Establishing a communications link – even if only a ‘garden hose’ – is a tough hurdle to be overcome.
One method being explored by Data61 is for the robots to drop battery powered ‘deployable communications pucks’ along their route.

“The downside is breaks in the chain might break the whole link, and there’s endurance of battery life if you’re employing powered systems. There’s the weight of all these things too – if you have to carry 20 or 30 it could become a significant fraction of your available payload,” Pauling says.
Another way could be to use very low frequency radio waves, which can penetrate through rock – but only so far.
“These challenges aren’t really solved yet,” says Pauling.
That’s it for me
The more the robots and drones can do by themselves the better. To explore and map a space, they will need to be pre-loaded with strategies – what should they do, for example, if they encounter a fork in a tunnel.
“You might say I’m always going to pick the left hand one first and go down there and keep going until I can’t go any further. And then I’m going to come back and explore the next tunnel I see. That’s one strategy,” says Pauling.
“The other way could be I’m going to go a little bit down the tunnel on the left until I hit another branching point, then I’ll come back out and try the other one and see how that goes and make a decision based on that. There are a lot of different strategies that need to be researched and explored,” he adds.
Those strategies will also need to consider the endurance of the bots, whether they can cover certain conditions more efficiently than others and also the importance of the information they have already collected.
The success of the mission will be paramount in the machines’ minds.
“It might be running out of battery. The best thing for it to do might be to say, I’m a disposable robot, I’ve got really important information that I’ve got from this tunnel, I better go back and tell the rest of the fleet that there’s this interesting thing down there – and that will be it for me,” Pauling says.
“That’s one of the nice things about robots they are disposable, and humans aren’t, and that’s one of the reasons you’d rather send them down into those environments,” he adds.
The team will be heading to the US to compete in the first of the challenges – the tunnel circuit – at the end of next year. The urban and cave circuits will be faced in 2020 before a final challenge combining each in 2021.
“It’s all tough,” Pauling says, “that’s why it’s a DARPA problem.”