What lies beneath: CSIRO robots rise to DARPA’s subterranean challenge
- 11 October, 2018 11:20

Dark and disorientating, prone to rockfalls and flooding, and often filled with toxic gases: caves are not a safe place for humans.
When people get stuck – and they often do – rescue teams face an often uncharted and always unpredictable environment.
“One of the main limitations facing warfighters and emergency responders in subterranean environments is a lack of situational awareness; we often don’t know what lies beneath us,” says Timothy Chung, from the US Defense Advanced Research Projects Agency (DARPA).
The agency, which sits within the United States Department of Defense, believes that instead of sending humans into the underground unknown, it would be safer for robot systems to serve as surrogates.
Advances in associated technologies have a reached a “crucial point” the agency says, and bots are on the brink of “permitting us to explore and exploit underground environments that are too dangerous for humans”.
As well as for civilian cave rescues, DARPA is also considering robots in military and national security settings, say the Taliban hideout Tora Bora, underground enemy military complexes and the drug smuggling tunnels that run into the US from Mexico.
“The hazards vary drastically across domains that can degrade or change over time and are often too high-risk for personnel to enter,” Chung adds.
To accelerate the field, late last year the agency announced a ‘Subterranean Challenge’ or ‘SubT’ in which teams are tasked with quickly and remotely mapping, navigating and searching for items in perilous underground environments.
This month a team from CSIRO’s Data61 Robotics and Autonomous Systems group was named as one of only seven teams globally to receive up to US$4.5 million from DARPA to compete in the three year contest.
CSIRO has a head start on many of the participants. It already has a fleet of legged robots – including the world’s first large scale ultra-light hexapod MAX and another which is capable of crossing tricky terrain like the Amazon Rainforest floor. The organisation has also refined a LIDAR mapping and autonomy product – Hovermap – which can generate highly accurate 3D maps.

But there are still major hurdles to overcome. Just as underground depths test human survival, they are incredibly tough territory for robots too. And in most cases, once down there, they’ll be going it alone.
Garden hose comms
Last year, CSIRO sent a drone fitted with its Hovermap payload 600 metres underground, down a mine in Western Australia.
Hovermap is a self-contained unit consisting of a small processor and a spinning cylinder, about the size of a can of beans, which emits 300,000 laser beams a second.
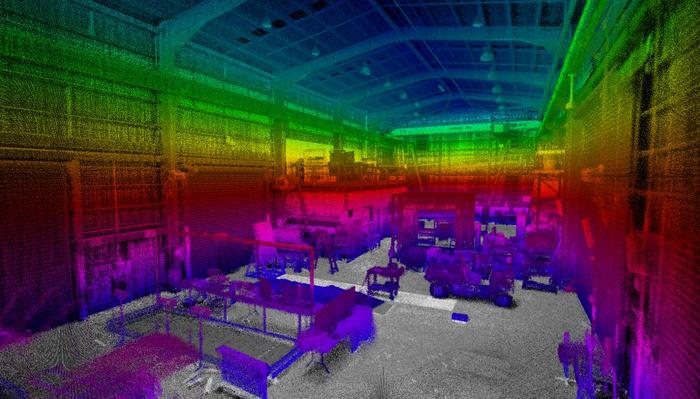
The LIDAR system creates a ‘3D point cloud’ of any space – even a dusty and lightless underground cavern – which allows the drone or robot it is mounted on to move around without GPS and not crash. Typically, after a flight around a space, the data is uploaded to a server for processing and a map is created.

For the DARPA challenge – which consists of three domains: tunnel systems, urban underground and cave networks – analysis after the fact won’t be sufficient.
But since there is no GPS, 3G coverage or Wi-Fi deep underground, it’s not feasible for a human operator on the surface to make decisions for the robots and look out for objects.
“You could have a camera running continually looking for things of interest but that strategy where you send a video stream back up and a human says ‘that’s interesting’ is not viable. Even if you send back every single laser point, each one of those takes a few bytes to encode, so sending all of that back is huge, a big firehose of data,” says Fred Pauling, Data61’s Robotics and Autonomous Systems group leader.
“You might only have a garden hose link back up, so you need to be really smart about how you compress that or send the most important information, and do as much as you can on board the robot to do processing and detecting things of interest,” Pauling, part of a 30-strong team featuring recruits from QUT, the University of Queensland and Georgia Institute of Technology assembled for the challenge, explains.
Page Break
Data61 has been working on a method of compressing the LIDAR made maps. Researchers recently devised a way to compress an image of a five hectare environment down to five or six megabytes.
“Whereas the total map would be multiple gigabytes,” says Pauling. “The trade-off is resolution and fidelity so these kind of things feed into what is required in the scenario and what do we do to get the information back that’s required on the surface.”
The work is done on board the drone or robot which will be fitted with “desktop power computers” with CPUs and GPUs.
Establishing a communications link – even if only a ‘garden hose’ – is a tough hurdle to be overcome.
One method being explored by Data61 is for the robots to drop battery powered ‘deployable communications pucks’ along their route.

“The downside is breaks in the chain might break the whole link, and there’s endurance of battery life if you’re employing powered systems. There’s the weight of all these things too – if you have to carry 20 or 30 it could become a significant fraction of your available payload,” Pauling says.
Another way could be to use very low frequency radio waves, which can penetrate through rock – but only so far.
“These challenges aren’t really solved yet,” says Pauling.
That’s it for me
The more the robots and drones can do by themselves the better. To explore and map a space, they will need to be pre-loaded with strategies – what should they do, for example, if they encounter a fork in a tunnel.
“You might say I’m always going to pick the left hand one first and go down there and keep going until I can’t go any further. And then I’m going to come back and explore the next tunnel I see. That’s one strategy,” says Pauling.
“The other way could be I’m going to go a little bit down the tunnel on the left until I hit another branching point, then I’ll come back out and try the other one and see how that goes and make a decision based on that. There are a lot of different strategies that need to be researched and explored,” he adds.
Those strategies will also need to consider the endurance of the bots, whether they can cover certain conditions more efficiently than others and also the importance of the information they have already collected.
The success of the mission will be paramount in the machines’ minds.
“It might be running out of battery. The best thing for it to do might be to say, I’m a disposable robot, I’ve got really important information that I’ve got from this tunnel, I better go back and tell the rest of the fleet that there’s this interesting thing down there – and that will be it for me,” Pauling says.
“That’s one of the nice things about robots they are disposable, and humans aren’t, and that’s one of the reasons you’d rather send them down into those environments,” he adds.
The team will be heading to the US to compete in the first of the challenges – the tunnel circuit – at the end of next year. The urban and cave circuits will be faced in 2020 before a final challenge combining each in 2021.
“It’s all tough,” Pauling says, “that’s why it’s a DARPA problem.”